-
- EL día Jueves 11 de Noviembre
se hizo la presentación y demostración del TILTO en nuestro
Instituto.
-
-
-
-
Destinatarios:
- 4º, 5º y
6º
- Electrónica
y Computación.
|
-
Objetivos:
-
- .Promover
la incentivación y la creatividad de los
alumnos a través de inventos y/o
proyectos terminados, como así también la
aplicación de algunos conceptos teóricos
aprendidos en las especialidades, en dicha
presentación.
|
-
-
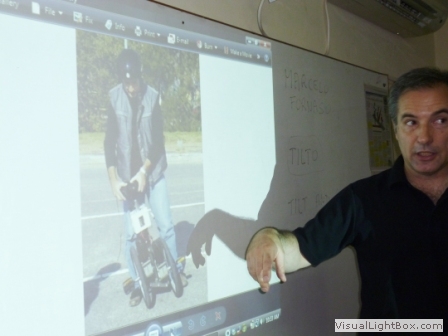
 Cómo
surgió la idea del TILTO? Cómo
surgió la idea del TILTO?
Para ir MUY al principio: Ya en charlas con amigos, hace
tiempo, había discutido la idea de fabricar una mountainboard con "ruedas inclinables".
Esta idea de las ruedas inclinables fue motivo de
burla estuvo presente en varias otras ideas, pero en algún
momento se me ocurrió aplicarla a un Segway.
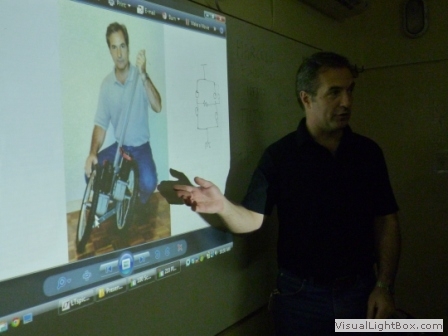
El Segway es un objeto de deseo para cualquier tecnófilo, y
aunque no sea la solución universal para el transporte de
personas (según sus fabricantes), resulta útil para paseos
cortos (probé uno en París) y hasta quizá para ir de casa a
la oficina (a 15 cuadras).
Un problema que encuentro en el Segway es que al desplazarse
a velocidad relativamente elevada (en comparación con un
peatón), en curvas sin peralte o inclinación produce fuerzas
laterales sobre el conductor, que tienden a "sacarlo" del
vehículo.
Esto hace que el conductor se deba inclinar bastante para
evitar caerse, y esto resulta incómodo y hasta inseguro,
porque la plataforma se encuentra horizontal cuando el
terreno es llano.
Aún a bajas velocidades, si el terreno tiene pendiente hacia
un lateral, la plataforma donde se para el conductor queda
inclinada y es incómoda y/o insegura.La
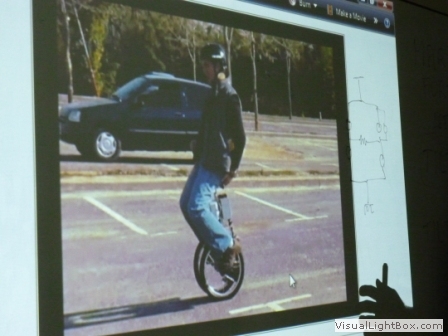
solución que se me ocurrió para este problema es una
plataforma que se incline, y ruedas también inclinables!
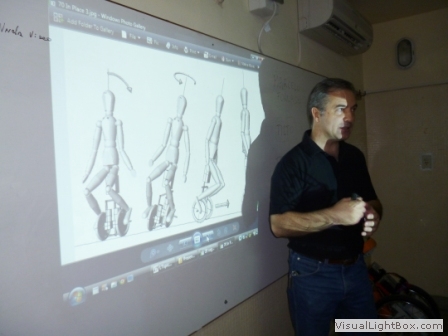
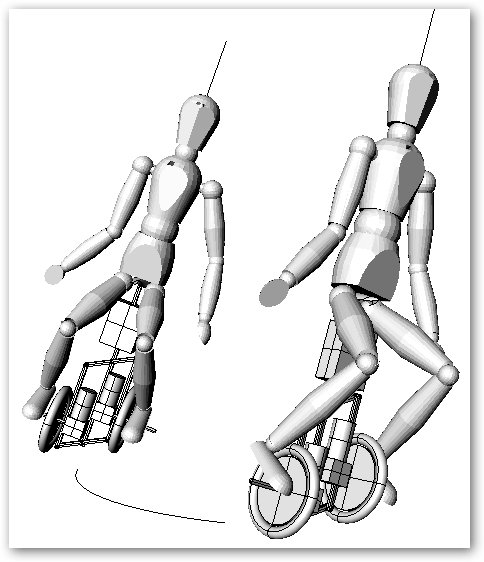
Pero la idea más importante no es que el aparato se incline
hacia los lados, sino agregar otro sistema inercial completo
que permita controlar la inclinación hacia los laterales,
impidiendo que el vehículo y su conductor se caigan.
El Segway no puede caer hacia los lados (en condiciones
normales) porque es mecánicamente rígido en esa dirección y
su centro de gravedad está sobre su base de apoyo, pero el Tilto sí
puede caer hacia los lados (es inclinable), entonces le
agregué un segundo sistema de control, para controlar ese
efecto.
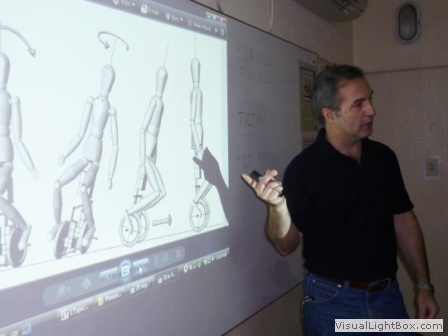
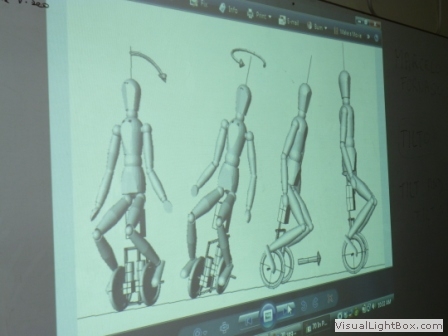
El resultado de este segundo sistema de control es que si el
vehículo está avanzando en línea recta y el conductor se
inclina hacia la derecha, por ejemplo, se producirá la
aceleración de la rueda izquierda y desaceleración
proporcional de la rueda derecha (de manera de mantener la
velocidad del Tilto constante)
y de esta forma las ruedas y el punto de apoyo del vehículo
se desplazarán hacia la derecha, modificando la trayectoria
general del Tilto
en ese sentido y volviéndolo a la posición vertical
(como haríamos en una bicicleta para mantener el equilibrio,
pero el Tilto dobla
solo!).El próximo
paso fue comenzar a escribir el software.
Para ello estudié muchos proyectos similares y tuve que
refrescar mis conocimientos de programación.
También tuve que actualizar todos los programas utilizados
para programar, compilar, simular, etc., y prácticamente
tuve que volver a aprender a usar microcontroladores.El
resultado fue un programa extenso, escrito en C para un
microprocesador 16F877 de la familia PIC (ya son obsoletos,
pero tenía un par en un cajón viejo...).
Descarté el Filtro Kalman y en su lugar utilicé Filtros
Complementarios para fusionar los datos de los acelerómetros
y de los giróscopos, para obtener los ángulos reales de
inclinación, libres de ruido (casi).
Luego un algoritmo PID (Proporcional, Integral más
Derivada) produce las señales PWM (Modulación por Ancho de
Pulso) ara ser enviadas a los controladores de potencia de
los motores.
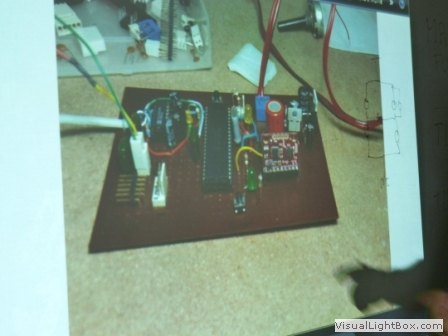
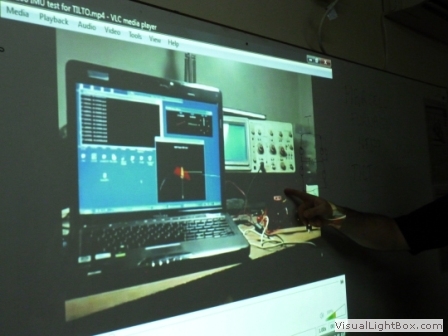
Cuando el software estuvo razonablemente listo compré una IMU (Unidad de Medición Inercial) de 5 grados de libertad (3
acelerómetros + 2 giróscopos) y la monté junto con el
microprocesador, en una plaqueta marrón de mala calidad.
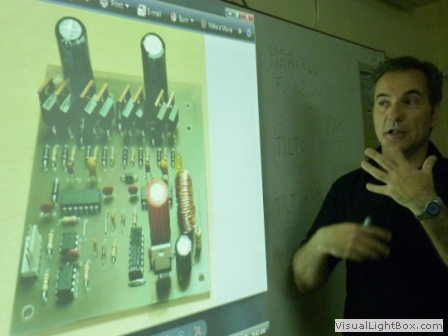
Contento con el funcionamiento del "cerebro" pasé al diseño
y construcción de los módulos controladores de potencia de
los motores.
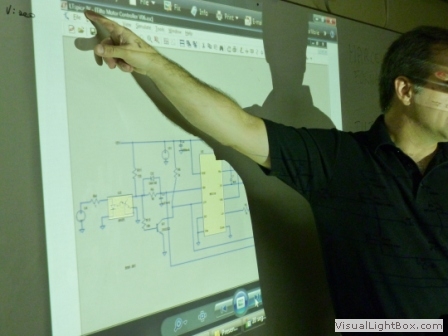
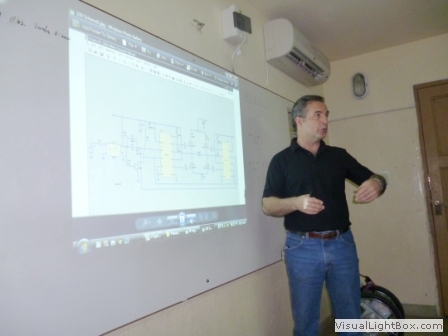
El diseño se hizo desde cero, utilizando componentes que se
pudieran conseguir en mi ciudad (Buenos Aires, Argentina), y
sobredimensionando las prestaciones para tener un margen de
seguridad de funcionamiento.
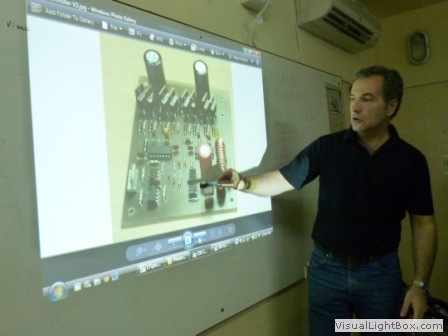
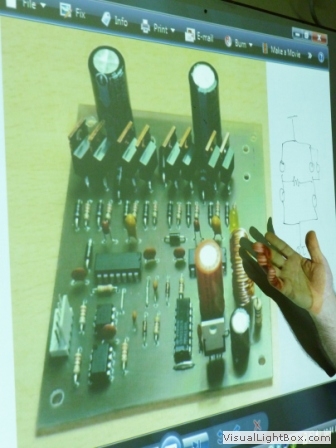
El resultado fueron dos circuitos de switching, en dos
placas caseras llenas de transistores MOSFET de potencia,
capaces de manejar casi 10 veces la corriente necesaria.
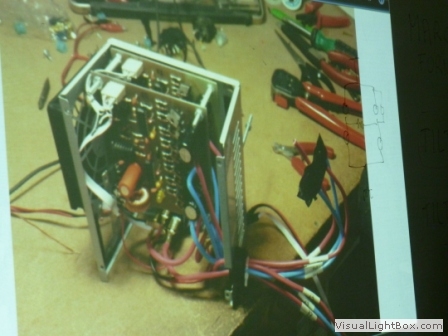
Cuando los módulos de potencia estuvieron probados ("casi"
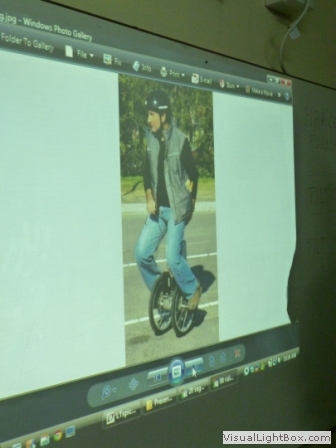
sin quemar nada en las pruebas), salí a comprar fierros.
Trabajé un poco en el taller de mi amigo Nicolás y otro poco
en mi departamento, y en poco tiempo tuve armada una
estructura sencilla y comencé las primeras pruebas del Tilto:En
este punto se me presentó el problema más difícil: Los
motores eléctricos (donados por mi nuevo amigo Gustavo) son
de segunda mano y un poco gastados, y tienen mucho juego
mecánico en los engranajes de las cajas reductoras. Esto
produce una zona muerta en la que el sistema no tiene
control y produce fuertes sacudones que desestabilizan todo
el aparato.
Estuve una semana completa pensando y probando posibles
soluciones mecánicas, hasta que una mañana me desperté con
una solución sencilla, por software.
Funcionó bastante bien, y por fin pude montar la bestia Tilto!
(Relatos:
Marcelo Fornaso.)
|